Reaction Rules
These functions are taken from the SSR unit test: they build the LHS/RHS bigraphs including interfaces and tracking maps.
We use four rule families (meta-rules, template rules) to parameterize the system by the number of robots:
1. Start synchronization: startSync(i, j)
Matches adjacent robots with i > j, installs a shared lock (SLckRef) so they can coordinate.
// Example: robot 1 (left) synchronizes with robot 0 (right).
ReactionRule<PureBigraph> r1 = startSync(1, 0);
Here, i and j represent robot IDs.
Think of startSync(1, 0) as:
"If Robot 1 is next to Robot 0, and they are not yet locked, create a lock between them so they can coordinate their next moves."
The lock (SLckRef) is like a handshake:
"We're now linked — only we two will coordinate until this lock is released."
Understanding startSync(1, 0)
The startSync(i, j) reaction rule models the initiation of synchronisation between two neighbouring robots.
It is only applicable if the left-hand robot’s ID i is greater than the right-hand robot’s ID j (i > j).
This feature is encoded spatially.
This constraint enforces the sorting logic. The "larger" robot should move past the "smaller" one.
Since the robots moving on a grid, the physical constraints is native and encoded explicitly.
 |  |
|---|---|
| Left-hand Side of the Rule | Right-hand Side of the Rule |
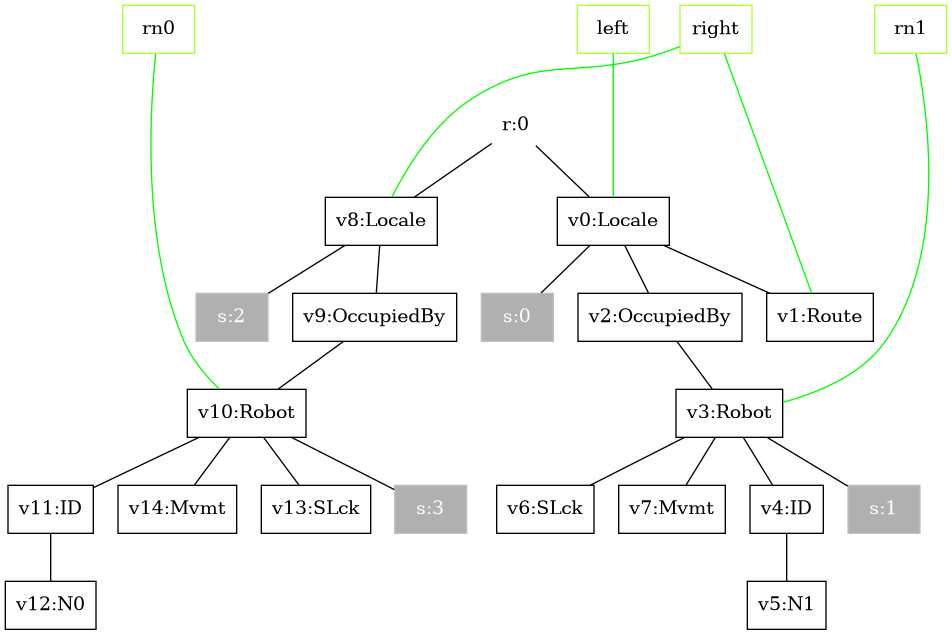
Before synchronisation (LHS)
- Two adjacent locales:
Localeleft containingRobotwith IDN0Localeright containingRobotwith IDN1
- Each robot is wrapped in an
OccupiedBycontainer and has:IDnode holding its identity (N0,N1)Mvmtnode (movement control)SLcknode (lock) with no references
- There is no shared link between their
SLcknodes, i.e., robots are independent.
Preconditions matched:
- Robots are adjacent in the grid environment.
- IDs satisfy
i > j→ in our example,1 > 0. - Neither robot is yet synchronised.
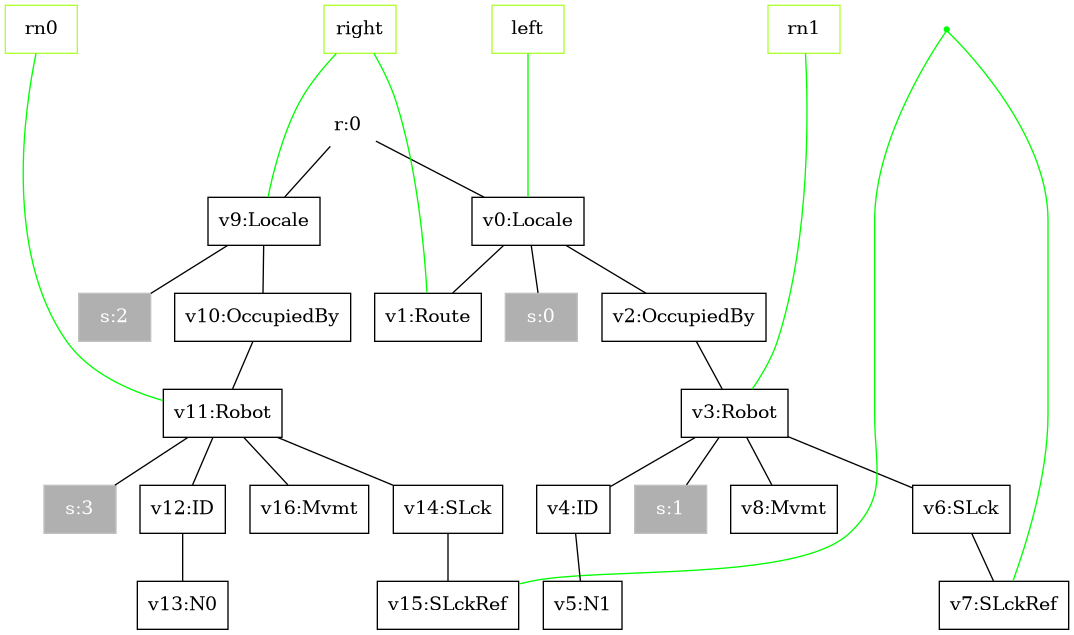
After synchronisation (RHS)
- The same two
Locale/Robotstructures remain in place. - Both
SLcknodes now have aSLckRefchild linked to the same edge (private link). - This edge represents a shared lock, i.e., a communication channel between these two specific robots.
Effect of the rule:
- Positions, IDs, and movement tokens remain unchanged.
- The only modification is adding the shared lock reference so that further rules (
initMovePattern(),moveRobotWaypoint(),endSync()) can safely operate on this pair.
2. Initialize movement pattern: initMovePattern()
Adds Tokens under Mvmt and installs waypoint bindings so that the subsequent move rule (moveRobotWaypoint) has something concrete to consume and follow.
ReactionRule<PureBigraph> r2 = initMovePattern();
Think of initMovePattern() as:
"Now that two robots are synchronized (share a lock), give them a movement plan."
That plan consists of two ingredients:
Token(s) under each robot’sMvmt: permission/energy to perform a bounded number of moves.- Waypoints: links that encode where a robot is allowed to move next (e.g., "from left locale to right locale" and vice versa).
Without this rule, moveRobotWaypoint() (next rule) would have nothing to "spend" (no token) and no "direction" (no waypoint).
Understanding initMovePattern()
initMovePattern() is the bridge between "robots are locked together" and "robots can actually start swapping positions".
It prepares the local configuration so that movement becomes a controlled, step-by-step process, according to a fixed pattern.
Controlling the drone is performed by attaching drones to waypoints.
 |  |
|---|---|
| Left-hand Side of the Rule | Right-hand Side of the Rule |
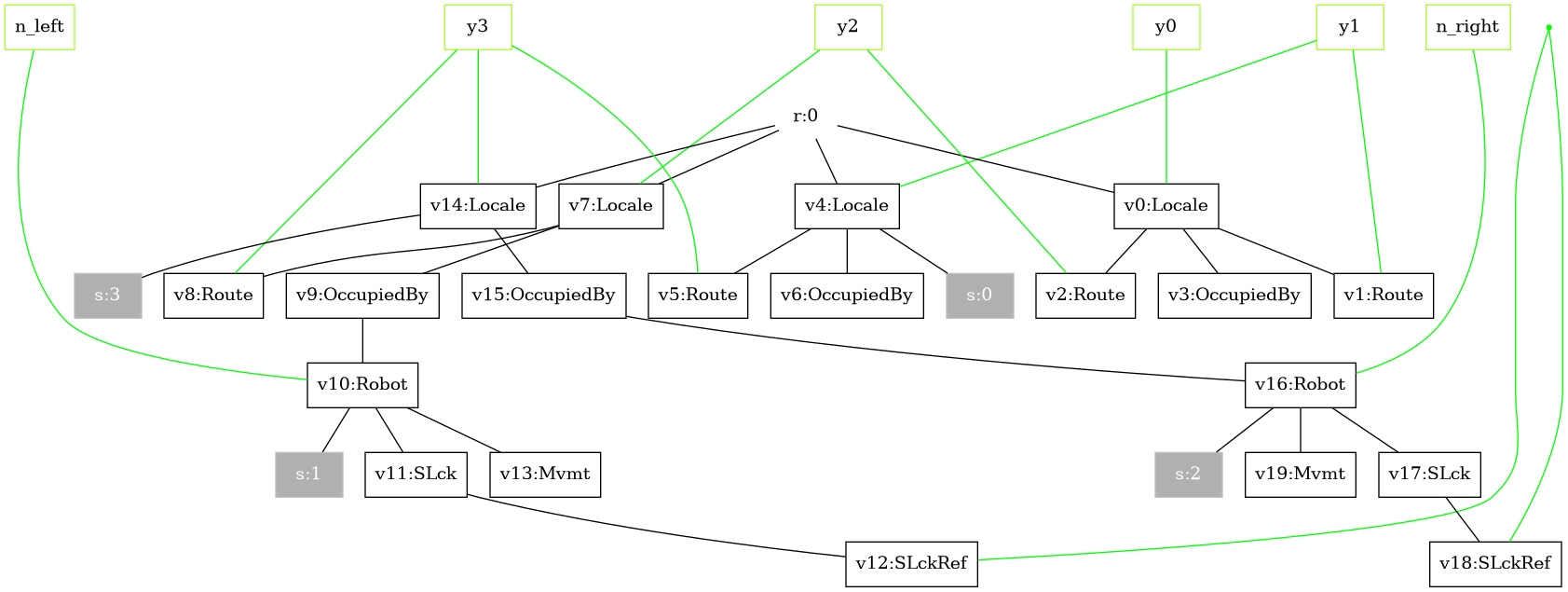
Before movement initialisation (LHS)
- Four neighbouring
Locales, two containing aRobot(viaOccupiedBy). - The two robots are already synchronised:
- each robot has an
SLcknode - each
SLckcontains anSLckRef - both
SLckRefs are linked to the same edge (shared lock channel)
- each robot has an
- Each robot already has an
Mvmtnode, but it has no active "movement resources" yet:- no
Token - no waypoint bindings that would tell the robot which
Route/target locale to follow
- no
Preconditions matched:
- The robots are adjacent.
- They are already privately paired (via the shared lock).
- The path has not been defined yet.
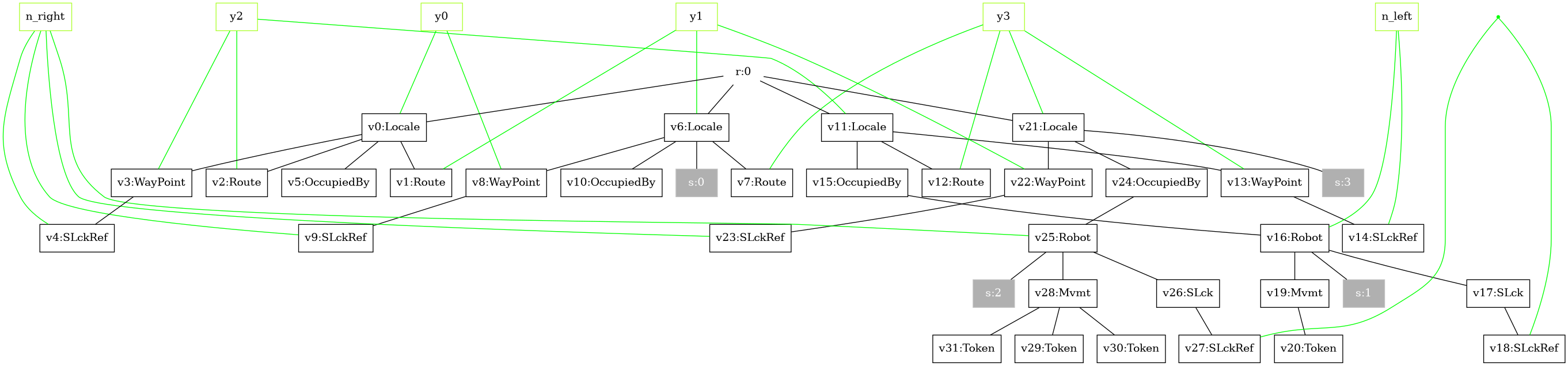
After movement initialisation (RHS)
- Under each robot's
Mvmt, one or moreTokennodes are created. - These tokens represent discrete movement steps that can later be consumed by
moveRobotWaypoint(). - The rule also installs waypoint links:
- it binds names (outer) so that a robot's movement control is connected to the appropriate
Routestructure - conceptually, this encodes "next hop" information: source locale to target locale
- it binds names (outer) so that a robot's movement control is connected to the appropriate
- Importantly, positions do not change yet:
- locales, robots, IDs, and the shared lock remain as-is
- only the movement machinery is added
Effect of the rule:
- Robots remain synchronised and stationary.
- Each robot gains:
- a finite budget to move (
Tokens), and - a direction/plan (waypoint bindings)
- a finite budget to move (
- The configuration is now ready for repeated application of
moveRobotWaypoint()(next rule) until tokens are exhausted (or until the exchange is completed andendSync(i, j)releases the lock).
3. Move along waypoint: moveRobotWaypoint()
Consumes one Token and moves one Robot from a source Locale to a target Locale by following the installed waypoints.
ReactionRule<PureBigraph> r3 = moveRobotWaypoint();
Think of moveRobotWaypoint() as:
"If a robot has a movement token, and its current locale has a waypoint that points to a neighbouring target locale, then spend one token and move the robot to that target locale."
Understanding moveRobotWaypoint()
This rule is the actual step that changes positions in the bi-grid.
Everything before it (startSync(), initMovePattern()) only prepares the configuration; this one performs the movement.
 |  |
|---|---|
| Left-hand Side of the Rule | Right-hand Side of the Rule |
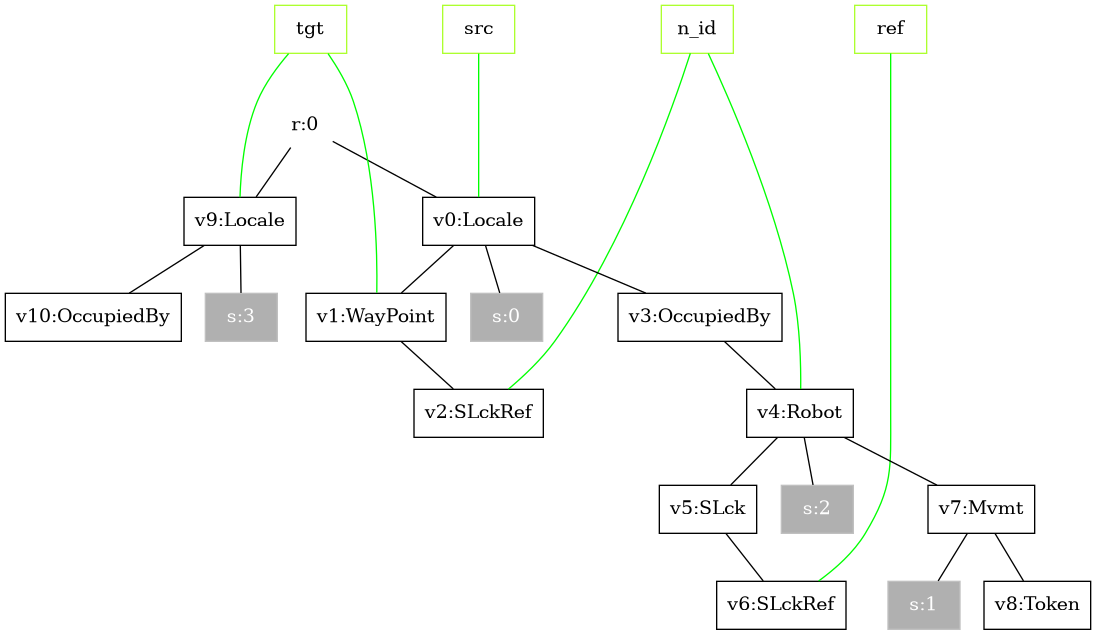
A useful way to read the diagram is via the outer names (green): src, tgt, ref, n_id.
src: the locale the robot is currently intgt: the neighbour locale it is allowed to move toref: the "route/waypoint reference channel" (installed byinitMovePattern()with corresponding lock nodesSLckandSLckRef)n_id: the shared lock/name channel used to keep the synchronised pair consistent while moving
Before movement (LHS)
- There is a source locale
Localethat currently contains the robot: - It has an
OccupiedBywhich contains aRobot. - The robot has a resource
Mvmtthat still contains at least oneToken: - This token represents "one step of permission to move".
- The source locale also contains a
WayPointnode. - This waypoint is linked to a drone.
- The robot remains synchronised (it still has an
SLckwith anSLckRef), and the lock identity is preserved.
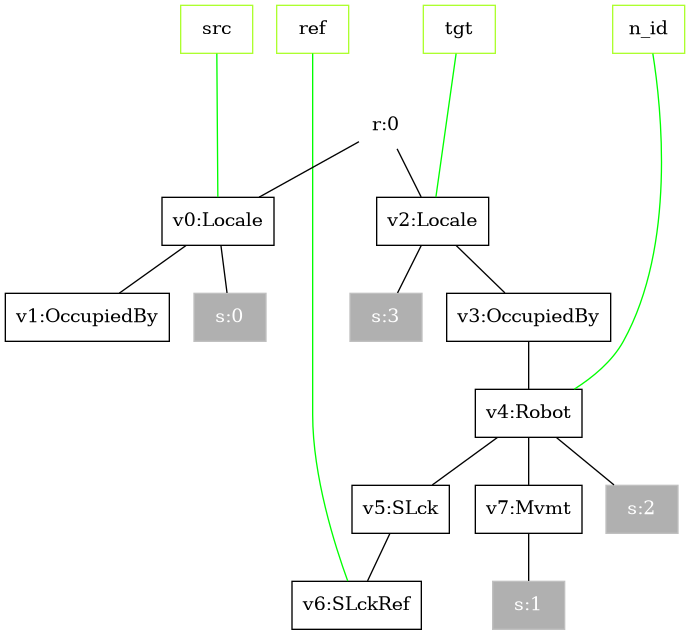
After movement (RHS)
- The robot is re-parented from the source
Localeto targetLocale - Exactly one
Tokenis consumed: - The robot’s identity and synchronisation bookkeeping are preserved: the
SLck/SLckRefstructure is kept (still "locked" while moving). - The waypoint reference is maintained consistently so further moves (if more tokens remain) can proceed in the same controlled fashion.
Effect of the rule:
- Movement: re-parent the entire Robot sub-tree from the source
Localeto the targetLocaledesignated by theWayPointbinding, while preserving the robot's synchronisation structure (SLckandSLckRef, i.e. the same lock identity). - Tokens enforce bounded, step-by-step motion (no "teleporting" multiple locales at once).
- Waypoints ensure the robot moves only along allowed neighbour relations (the "direction/route" is encoded as links, not as arithmetic or global state).
- Keeping the lock channel (
n_id) intact ensures the two robots can keep coordinating untilendSync(i, j)finally releases the lock.
4. End synchronization: endSync(i, j)
Releases locks when the exchange is done.
// Example: release sync between robot 0 and robot 1 (0 < 1 for end)
ReactionRule<PureBigraph> r4 = endSync(0, 1);
Here, i and j are robot IDs.
Think of endSync(0, 1) as:
“If Robot 0 and Robot 1 are currently locked together, remove that lock so they can each continue interacting with other robots.”
The SLckRef link is removed, effectively breaking the private communication channel between the two robots.
Understanding endSync(0, 1)
The endSync(i, j) rule models the termination of synchronisation between two neighbouring robots.
It only applies if the left-hand robot’s ID i is smaller than the right-hand robot’s ID j (i < j).
This complements the startSync rule. After cooperation or an exchange, the link is removed.
 |  |
|---|---|
| Left-hand Side of the Rule | Right-hand Side of the Rule |
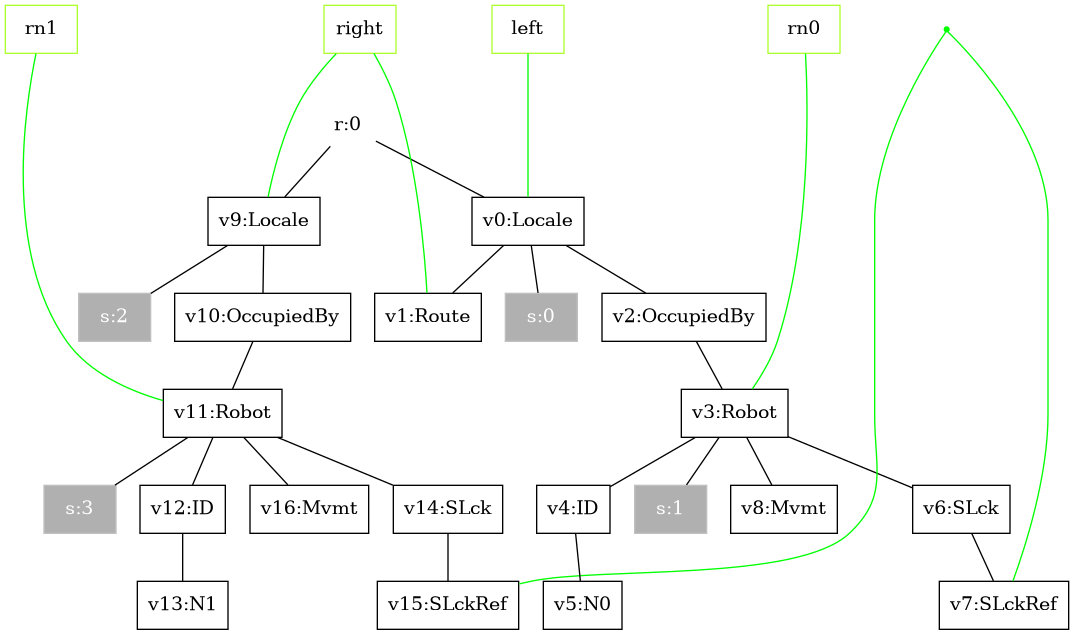
Before releasing (LHS)
- Two adjacent locales:
- Localeleft contains Robot with ID
N0 - Localeright contains Robot with ID
N1
- Localeleft contains Robot with ID
- Each robot has:
- An
IDnode for its identity - A
Mvmtnode - An
SLcknode containing aSLckRefchild
- An
- Both
SLckRefnodes are linked to the same edge, indicating they are currently locked together.
Preconditions matched:
- Robots are adjacent.
- IDs satisfy
i < j→ here0 < 1. - They are already synchronised.
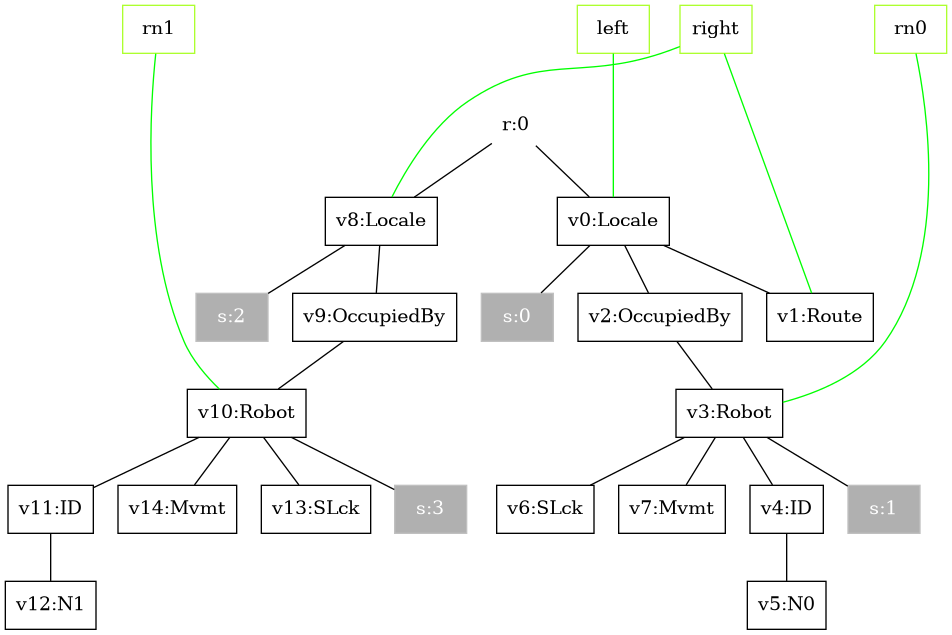
After releasing (RHS)
- The same Locale and Robot structures remain.
- The
SLckRefchildren have been removed from bothSLcknodes. - The robots are now "free". No shared lock link remains.
Effect of the rule:
- The robots retain their positions, IDs, and other attributes.
- The only change is the removal of the shared lock, making them available for future synchronisations with other robots.