Outline
This tutorial models and simulates a Self‑Sorting Robots (SSR) system in the Bigraph Framework.
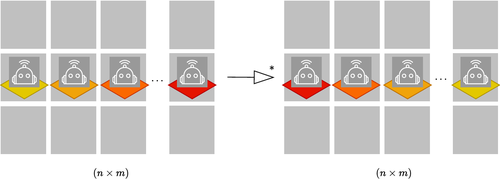
We’ll build a grid, place three robots, define synchronization and movement rules, then run a BFS model check to explore all behaviors until the robots are sorted by ID.
You will also see how the compositional nature of bigraphs helps to generalize this for n robots and not only three.
What you’ll learn
- Combine environment and agent components into one bigraph
- Encode synchronization with locks (
SLck,SLckRef) - Drive motion using movement tokens and waypoints
- Explore behaviors via reaction graphs
The complete code can be found here: SelfSortingRobots.java