Initial State
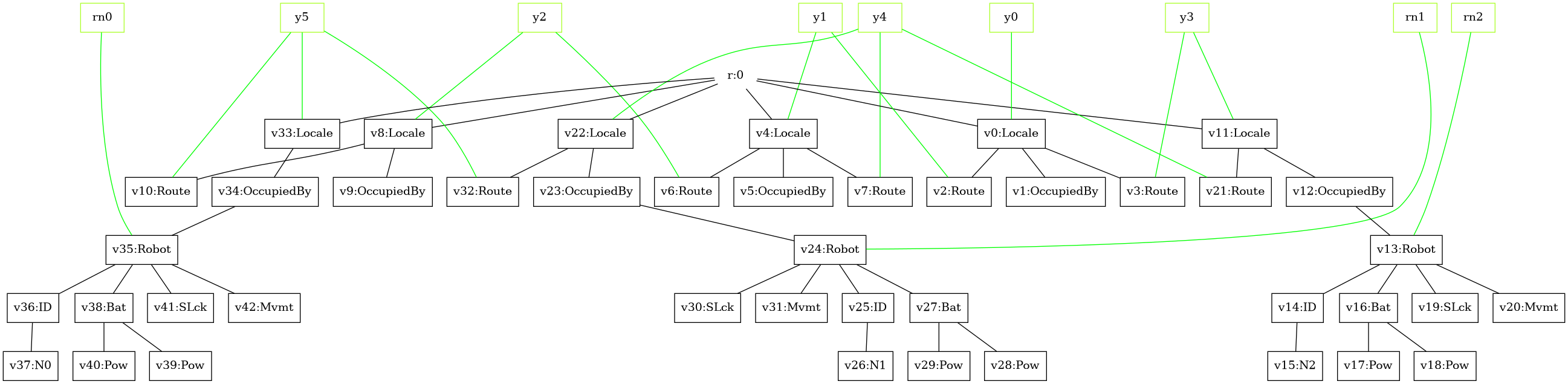
We start with three robots on a 2×3 grid.
int roboCountTotal = 3; // three robots
String gridFile = "2x3_unidirectional";
PureBigraph grid = createBigrid(gridFile); // loads XMI grid
// Place robots into the grid's sites; last index is where we start placing (right to left)
PureBigraph robots = initRobots(grid.getSites().size(), roboCountTotal, 2*roboCountTotal - 1);
PureBigraph agent = ops(grid).nesting(robots).getOuterBigraph();
Cells of the grid are unidirectionally linked in this example.
Each robot looks like: OccupiedBy( Robotrid ( ID(Ni), Bat(Pow...), SLck, Mvmt ) ).
tip
You can visualize the PNG/XMI with the framework’s visualization/export modules.
If you export the agent (optional):
eb(agent, "ssr_agent_3R_2x3grid", "src/test/resources/dump/selfsortingrobots/");