Reaction Rules
We’ll use four rule families regardless of the number of robots:
1. Start synchronization — startSync(i, j)
Matches adjacent robots with i > j, installs a shared lock (SLckRef) so they can coordinate.
// Example: sync robot 1 with robot 0 (since 1 > 0)
ReactionRule<PureBigraph> r1 = startSync(1, 0);
Intuition
Here, i and j represent robot IDs.
Think of startSync(1, 0) as:
“If Robot 1 is next to Robot 0 and they are not yet locked, create a lock between them so they can coordinate their next moves.”
The lock (SLckRef) is like a handshake:
“We’re now linked — only we two will coordinate until this lock is released.”
Understanding startSync(1, 0)
Purpose
The startSync(i, j) reaction rule models the initiation of synchronisation between two neighbouring robots.
It is only applicable if the left-hand robot’s ID i is greater than the right-hand robot’s ID j (i > j).
This constraint enforces the sorting logic — the "larger" robot should move past the "smaller" one.
Since the robots moving on a grid, the physical constraints are encoded explicitly.
 |  |
|---|---|
| Left-hand Side of the Rule | Right-hand Side of the Rule |
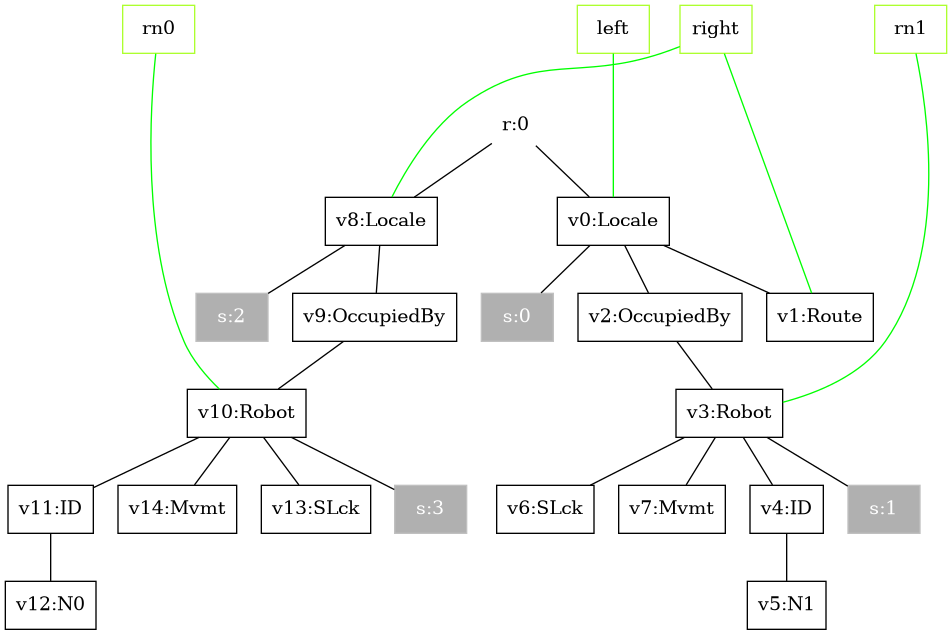
LHS – Before synchronisation
On the left-hand side, the bigraph pattern matches:
- Two adjacent locales:
Localeleft containingRobotwith IDN0Localeright containingRobotwith IDN1
- Each robot is wrapped in an
OccupiedBycontainer and has:IDnode holding its identity (N0,N1)Mvmtnode (movement control)SLcknode (lock) with no references
- There is no shared link between their
SLcknodes — robots are independent.
Preconditions matched:
- Robots are adjacent in the grid environment.
- IDs satisfy
i > j→ in our example,1 > 0. - Neither robot is yet synchronised.
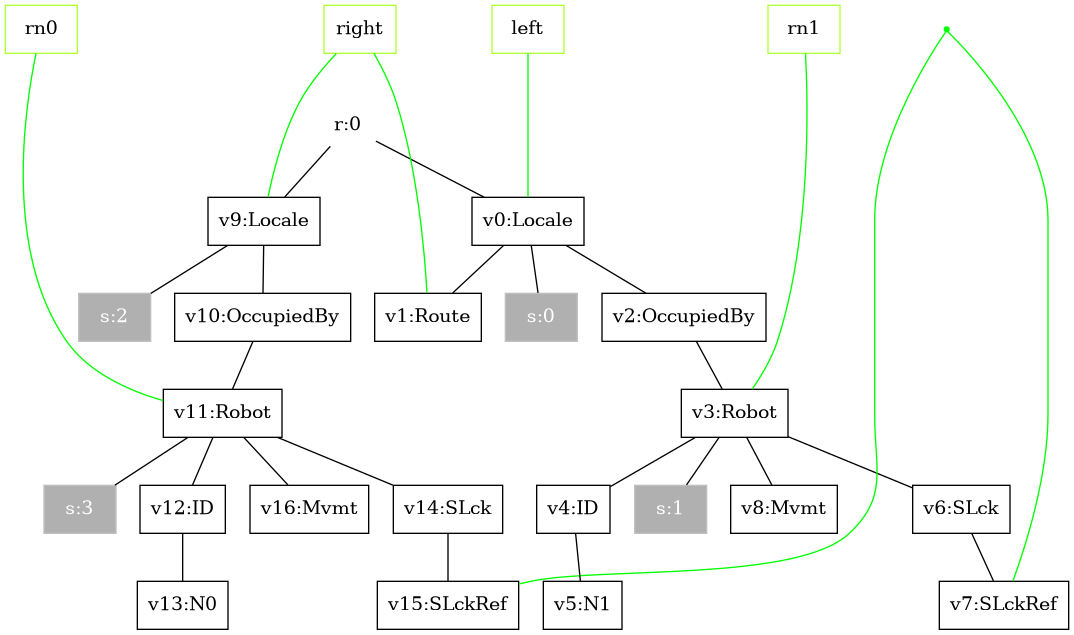
RHS – After synchronisation
On the right-hand side:
- The same two
Locale/Robotstructures remain in place. - Both
SLcknodes now have aSLckRefchild linked to the same inner name"x". - This inner name represents a shared lock — a communication channel between these two specific robots.
Effect of the rule:
- Positions, IDs, and movement tokens remain unchanged.
- The only modification is adding the shared lock reference so that further rules (
initMovePattern,moveRobotWaypoint,endSync) can safely operate on this pair.
2. Initialize movement pattern — initMovePattern()
Adds Tokens under Mvmt and waypoint nodes so that a move can occur.
ReactionRule<PureBigraph> r2 = initMovePattern();
3. Move along waypoint — moveRobotWaypoint()
Consumes one Token and moves a robot from a source Locale(src) to a target Locale(tgt).
ReactionRule<PureBigraph> r3 = moveRobotWaypoint();
4. End synchronization — endSync(i, j)
Releases locks when the exchange is done.
// Example: release sync between robot 0 and robot 1 (0 < 1 for end)
ReactionRule<PureBigraph> r4 = endSync(0, 1);
Intuition
Here, i and j are robot IDs.
Think of endSync(0, 1) as:
“If Robot 0 and Robot 1 are currently locked together, remove that lock so they can each continue interacting with other robots.”
The SLckRef link is removed, effectively breaking the private communication channel between the two robots.
Understanding endSync(0, 1)
Purpose
The endSync(i, j) rule models the termination of synchronisation between two neighbouring robots.
It only applies if the left-hand robot’s ID i is smaller than the right-hand robot’s ID j (i < j).
This complements the startSync rule — after cooperation or an exchange, the link is removed.
 |  |
|---|---|
| Left-hand Side of the Rule | Right-hand Side of the Rule |
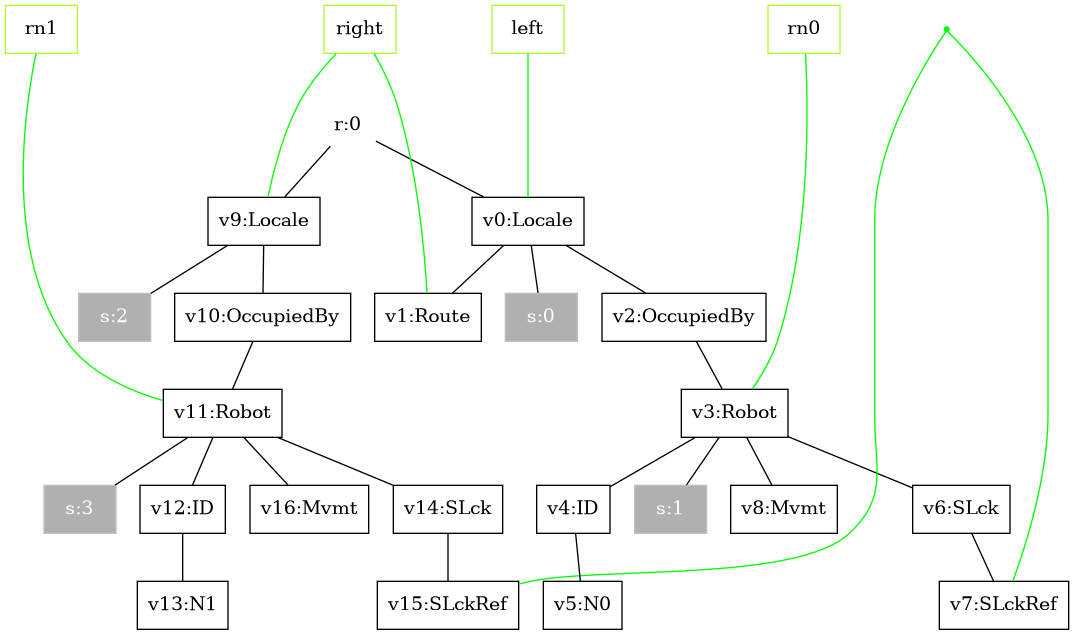
LHS – Before releasing
On the left-hand side:
- Two adjacent locales:
- Localeleft contains Robot with ID
N0 - Localeright contains Robot with ID
N1
- Localeleft contains Robot with ID
- Each robot has:
- An
IDnode for its identity - A
Mvmtnode - An
SLcknode containing aSLckRefchild
- An
- Both
SLckRefnodes are linked to the same inner name, indicating they are currently locked together.
Preconditions matched:
- Robots are adjacent.
- IDs satisfy
i < j→ here0 < 1. - They are already synchronised.
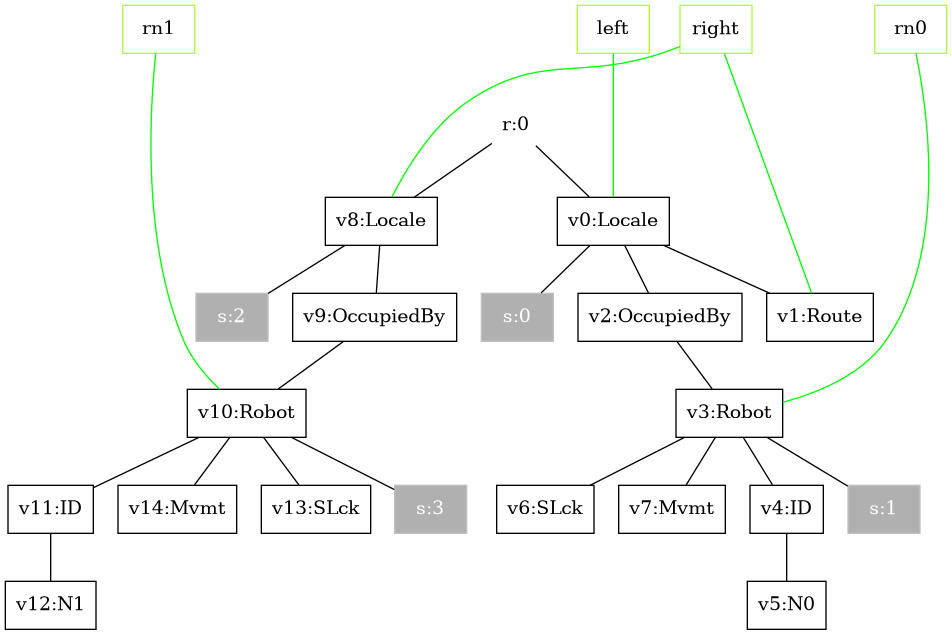
RHS – After releasing
On the right-hand side:
- The same Locale and Robot structures remain.
- The SLckRef children have been removed from both SLck nodes.
- The robots are now “free” — no shared lock link remains.
Effect of the rule:
- The robots retain their positions, IDs, and other attributes.
- The only change is the removal of the shared lock, making them available for future synchronisations with other robots.
These functions are taken from the SSR unit test: they build the LHS/RHS bigraphs including interfaces and tracking maps.